Video surveillance and object recognition.
Vehicles video recording and registration systems, sensors of ADAS (driver assistance systems) and robotic systems.
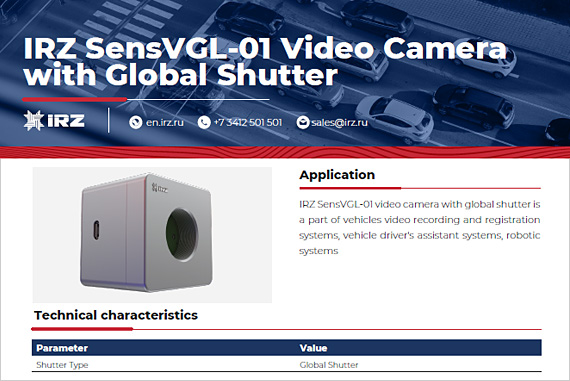
IRZ SensVGL video camera films the surrounding space and forms a video sequence for further analysis on a central computer when performing the functions of 1) object recognition, 2) determining the characteristics of moving objects, 3) vehicle driver’s assistant system, or 4) autopilot’s assistant of a robotic system.
| Parameter | Value |
|---|---|
| Shutter type | Global Shutter |
| Sensor size (optical) | 2/3" |
| Sensor type | CMOS array SONY IMX264 |
| Sensor size | 8.4x7.1 mm |
| Resolution (Horizontal x Vertical) | 2448x2048 pixels |
| Resolution | 5 megapixels |
| Pixel size (Horizontal x Vertical) | 3.45x3.45 µm |
| Chrominance | monochrome / color |
| Color depth | 12 bit |
| Image resolution | 1920x1080 (1080р) or 2448х2048 (max) |
| Frame rate for color image | 60 fps (1080р), 30 fps (1080р), 36 fps (max) |
| Average power consumption | 0,1 W |
| Video format | uncompressed flow Bayer (RGGB) |
| Lens support | CS-mount (C-mount lenses are supported via an adapter) |
| Supply voltage | 3.3 V |
| Transferring frames to an external computer via the interface | mipi csi-2 |
| Weight | ≤70 |
| Overall dimensions | 35x35x35 mm |
| Operating temperature | –30…+70 °C |

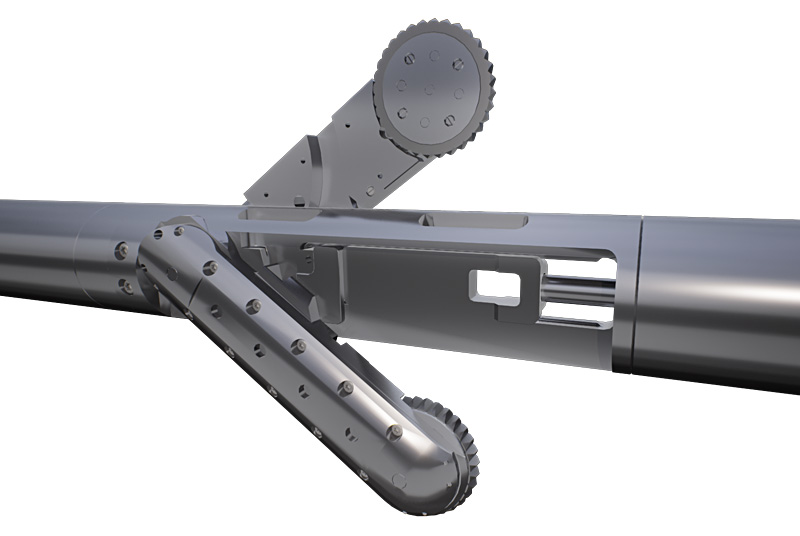
The Downhole Tractor is designed for the delivery of devices, geophysical and technological equipment to the horizontal section of oil, gas and water wells.

Designed for operation in analog and digital radio communication networks as a base radio / repeater

Determination of the range, angle (azimuth), direction and radial speed of vehicles movement.